SLAM(スラム)とは?仕組み・種類・活用事例まで徹底解説!
「自動運転やロボットがどうして迷わずに動けるのか?」その裏側にあるのが、SLAMという技術です。GNSSが届かない環境でも自律的に動けるこの仕組みは、今や多くの産業で欠かせない存在になっています。
本記事では、SLAMの基本的な仕組みや種類、活用事例、そしてメリットと課題についてわかりやすく解説します。
SLAMとは
SLAM(Simultaneous_Localization_and_Mapping)は、「自己位置推定(Localization)」と「環境地図(Mapping)の作成」を同時に行う技術を指します。SLAMを活用することで、ロボットやドローン、自動運転車といった移動体が、自らの位置を把握しながら周囲の環境をリアルタイムで地図化できるようになるのです。GNSS(GPSを含む衛星測位システム)に依存せずに現在地を推定できるため、屋内や地下など電波が届かない環境でも活用できるようになります。
SLAMの仕組み
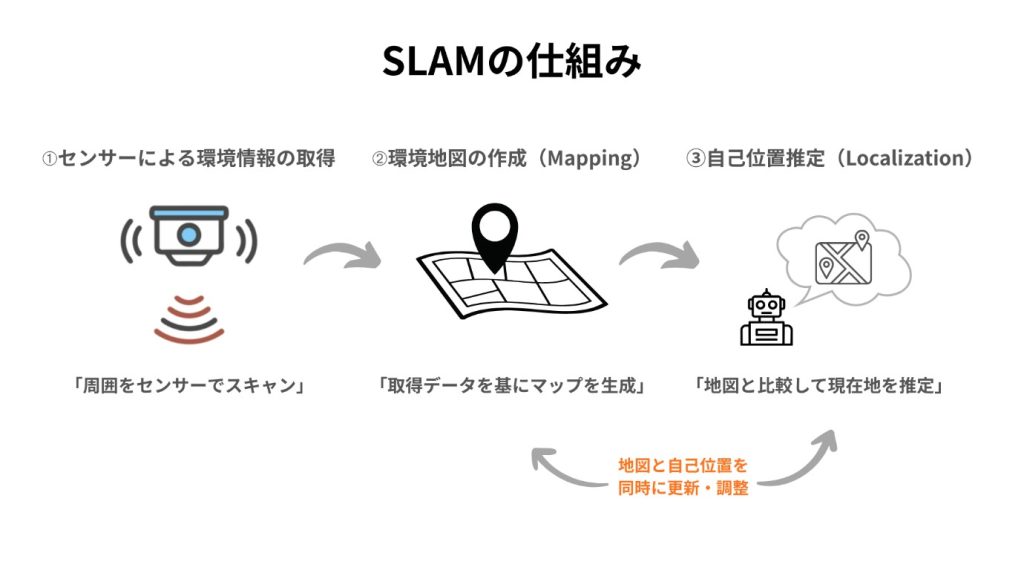
SLAMは、自己位置推定と環境地図作成を同時に行うことで成り立つ技術です。ここでは、SLAMで重要な4つの仕組みについて見ていきましょう。
センサーによる環境情報の取得
移動体はカメラ、LiDAR(レーザーセンサー)、ToFセンサー、深度センサー、IMU(慣性計測装置)などを用いて周囲を計測します。これにより、壁や障害物、特徴的なランドマーク(目印となる物体)までの距離や方向を把握し、LiDARでは高精度な3次元点群データを取得できます。
LiDARに関しては、こちらで詳しく解説しているのでご覧ください。
環境地図の作成(Mapping)
得られたセンサーデータを基に周辺環境のエリアマップを構築します。事前に地図が用意されていなくても、移動体自身が取得データを継ぎ足しながら地図を生成できる点が特徴です。
自己位置の推定(Localization)
移動体は、これまでに作成した地図と現在のセンサーデータを比較することで、自分の位置を割り出します。GNSSに頼らず位置を推定できるため、屋内や地下、トンネルなど電波が届かない場所でも利用可能です。
同時更新と誤差補正
SLAMの最大の特徴は、自己位置推定と地図作成をリアルタイムで同時に行う点です。移動距離だけに基づく推定では誤差が蓄積しやすいため、両者を並行処理することで精度低下を防ぎます。さらに、ロボットが同じ場所に戻った際に地図の矛盾を修正する「ループ閉じ込み(Loop Closure)」などの技術を活用し、自己位置とマップの精度を継続的に高めています。
SLAMの種類
SLAMにはいくつかの方式があり、代表的なものとして「LiDAR SLAM」「Visual SLAM」「Depth SLAM」の3つに大別されます。

LiDAR SLAM(ライダー スラム)
レーザー光の反射時間を測定して距離を計算し、点群データをもとに自己位置を推定しながら高精度な3Dマップを構築する手法です。自動運転や建設現場など、安全性と正確性が求められる分野で多く利用されています。
点群データに関しては、こちらをご覧ください。
Visual SLAM(ビジュアル スラム)
カメラ画像から特徴点を抽出し、それを手がかりに自己位置の推定と周囲の地図生成を行う手法です。
ステレオカメラを用いれば奥行き情報も取得でき、自動運転やロボット分野で周囲の物体認識と組み合わせて歩行者や標識の把握などに応用されています。
Depth SLAM(デプス スラム)
カメラに深度センサーを組み合わせて奥行き情報を取得しながら自己位置推定と地図生成を行う手法です。RGB-DカメラやToFカメラ、ステレオカメラが代表的に利用され、Visual SLAMの画像情報とLiDARの距離情報の中間的な特徴を持ちます。
SLAM技術のメリット
SLAMは、自律走行や空間認識を支える基盤技術です。ここでは、その具体的なメリットについて見ていきましょう。
GNSSに依存しない自己位置推定
SLAMの大きな利点のひとつは、GNSSに依存せず自己位置を推定できることです。これにより、トンネルや地下、建物内、森林など衛星信号が届かない環境でも正確に位置を把握できます。
また、高層ビルが立ち並ぶ都市部のようにGNSSの精度が不安定になりやすい場所でも、SLAMを併用することで安定した位置推定と地図作成が可能です。
高精度な空間認識とリアルタイムマッピング
SLAMの大きな強みは、移動体が周囲の環境をリアルタイムで把握し、その場で高精度な地図を作成できる点にあります。事前に地図を用意していなくても、移動しながら地形や障害物を自動で検出して地図を生成できるため、未知の環境にも即座に対応可能です。
また、環境を2次元ではなく3次元空間として認識できるため、より精密な状況把握が可能になります。
静的・動的な障害物を検出して安全で効率的なルートを選択できることから、自動運転やロボットの走行において安全性と効率性を大幅に高める技術だと言えます。複雑な道順や環境下でも自律走行が可能になる点も大きな特徴です。
>幅広い応用分野と高い柔軟性
SLAMは「機械の眼」として機能し、自動運転やドローン、AGV(無人搬送車)、ロボット、AR/VR/MRといった幅広い分野で活用されています。自己位置と環境地図を正確に把握できることから、自律走行や空間認識が求められるあらゆる場面で応用が可能です。
また、自動運転システムの「認識」機能を担うことで、システム全体の性能も向上します。カメラやLiDAR、深度センサー、IMUなど多様なセンサーを組み合わせると、目的や環境に合わせて柔軟に最適化できる拡張性の高さも特徴です。
SLAM技術の課題
SLAM技術は非常に革新的ですが、その導入と実用化にはいくつかの技術的、環境的、およびコスト的な課題やデメリットが存在します。
環境による精度低下
SLAMは自動運転やロボット、ドローンなど多くの分野で不可欠な技術ですが、方式ごとに固有の課題があります。
LiDAR SLAMは雨や霧、雪などでレーザーが散乱・吸収されやすく、特徴点の少ない平地ではデータ取得が難しくなる点が課題です。
Visual SLAMは光や天候の影響を受けやすく、暗所や逆光、雨天では精度が低下します。単眼カメラでは立体的な情報を得にくいという制約も課題の一つです。
また、Depth SLAMは赤外線を利用するため日光の影響を受けやすく、屋外での利用に弱いことや測定範囲が限られるといった制約があります。
方式を問わず共通する課題としては、周囲の環境が大きく変化すると事前の地図との整合性が崩れ、自己位置推定の精度が低下する可能性があることです。SLAMは多様な分野で活用が広がる一方で、環境条件や利用状況に左右されやすく、まだ克服すべき課題を抱えています。
高い計算負荷とコストの課題
SLAMはセンサーから得られる膨大なデータをリアルタイムで処理する必要があるため、計算負荷が非常に大きく、高性能なCPUやGPUなどのハードウェアが欠かせません。そのため、初期導入費用やランニングコストが高くなるのが大きな課題です。
特にLiDAR SLAMはセンサー自体が高価であり、さらに点群データの情報量が膨大なため処理負荷も大きくなります。また、Visual SLAMでも画像データの処理には高速な演算能力が求められ、リアルタイム処理で遅延を起こさないためのシステム設計が不可欠です。
処理時間と精度のトレードオフ
SLAMでは、自己位置推定にかかる計算時間と精度の間にトレードオフの関係があります。計算処理には時間が必要なため、そのまま結果を利用すると実際の位置よりも「過去の位置」として認識されてしまい、ずれが発生します。
これを解消するには処理をリアルタイム化する必要がありますが、精度の高い技術は計算時間が長く、逆に処理が速い技術は精度が低いことが課題です。そのため、短時間で計算できる手法と高精度な手法を組み合わせ、処理時間と精度のバランスを取る工夫が求められます。
導入の難しさと個別最適化の必要性
SLAMシステムの導入や開発には、高度な技術と専門知識が欠かせません。センサーデータの誤差やノイズの除去、異なるセンサー間のデータ同期、専用アプリケーションのプログラミングなど、設計段階から高度なスキルが求められます。
また、SLAMは環境によって最適な手法や精度が大きく変わるため、単に導入するだけでは十分な成果が得られないケースも多くあります。そのため、利用環境に合わせたアルゴリズム設計やトライアンドエラーによる調整が必要となり、専門的な知見に基づく個別最適化が不可欠です。
SLAMの活用事例
SLAMは多様な業界で導入が進んでいます。
自動運転技術

SLAMは自動運転技術の中核を担い、リアルタイムで周囲の環境や障害物を検知し、車線や先行車を捉えて正確な走行を可能にします。GNSSが不安定になりやすいトンネルや都市部の高層ビル街でも、環境の影響を受けずに位置推定と地図作成が行える点が大きな強みです。
ロボット技術

SLAMは工場や物流現場のAGVやピッキングロボットに活用され、部品や製品を自動で正確に運ぶ仕組みを支えています。サービス分野では、飲食店の配膳ロボット「BUDDYイントルーダー」などが代表例です。家庭用では、パナソニックの掃除ロボット「RULO」やAmazonの「Astro」がSLAMを用いて室内地図を作成し、効率的な清掃や障害物回避を実現しています。
ドローン

SLAMはドローンやUAVの自律飛行を実現するための中核技術です。障害物を検知して回避しながら飛行できるため、特にGNSSが届かない屋内や橋の下、ビル内部など複雑な環境でも安全に自動操縦が可能です。例えば、Skydio2+などのドローンでは点検業務に導入されています。飛行時に取得した画像や位置データをもとにオルソデータや3Dデータを作成でき、測量や地形解析にも活用されています。
XR(AR/VR/メタバース)分野

SLAMはARやVR、メタバースといったXR分野の基盤技術にも活用されています。
VRヘッドセットの位置トラッキングやARグラスでの空間認識に利用され、現実空間を正確に把握して仮想情報を適切に重ね合わせます。これにより、リアルタイムな位置認識と空間把握が可能となり、現実と仮想が自然に融合し、没入感の高い体験を提供するのです。
また、スマートフォンや小型デバイスにも組み込みが進んでおり、SLAM はAR/VRアプリの普及を支える重要な技術となっています。
建築、エンジニアリング、建設、都市計画

SLAM技術は高精度な空間データを取得できるため、建設・エンジニアリングや都市計画などのデジタル化を支える重要な技術です。LiDAR SLAMを搭載したモバイルマッピング機器は、鉱業や林業のようにGNSS測位が難しい現場や、建物・屋内空間の計測に活用されています。
例えば、工場や設備をデジタルツインとしてモデル化する際には、SLAM対応のハンディスキャナーが効率的な手段となりやすいでしょう。取得したデータは3D CADやBIM、仮想空間モデルの作成に利用でき、建築分野ではVisual SLAMを活用したAR表現がデザイン検討の支援に応用されつつあります。
SLAMによる点群データと設計への活用
ここまで見てきたように、SLAMはカメラやLiDAR、ToFセンサーなど多様なセンサーを組み合わせ、周囲の環境を正確に計測できます。特にLiDAR SLAMでは、レーザー光の飛行時間を測定して距離を求め、物体を点の集合体である点群データとして記録可能です。この手法により、高精度な3D地図やモデルの基盤となるデータが生成されます。
SLAMによって取得できる点群データは、建設現場や工場、都市空間のデジタル化に広く活用されています。また、点群データは設計やモデリングにも活用可能です。例えば、SketchUpのプラグイン「Scan Essentials」を使えば、SLAMやLiDARで取得した点群データ(E57、LAZ、PLY、TZFなどの形式)をそのままインポートし、モデルと点群の合成や、点群を元にしたモデリングを可能にします。
Scan Essentialsの機能については、資料をダウンロードしてご覧ください。
Scan Essentialsの付属しているSketchUpはこちら
SketchUp Studio サブスクリプション Windows版 標準パック
SketchUp Pro Advanced Workflows サブスクリプション
SketchUp Pro Scan サブスクリプション
まとめ
SLAMは、自己位置推定と環境地図作成を同時に実現する革新的な技術であり、自動運転やロボティクス、ドローン、XR、建設・都市計画など幅広い分野で導入が進んでいます。GNSSに依存せずに高精度な空間認識が可能になるという大きなメリットがあります。一方、環境条件による精度低下や高い計算負荷、導入コストなどの課題は把握しておかなければなりません。
今後は、センサー技術やアルゴリズムの進化により、より高精度かつ実用的なシステムへと進化し、多様な領域での応用がさらに広がっていくでしょう。このとき、「Scan Essentials」のようなツールを知っておくことで、SLAMで取得できる点群データを有効に活用できるようになります。
Scan Essentialsの詳細については以下の動画からご覧いただけます。

-
 3Dモデリングとは?仕組みや作り方、ソフトの選び方までを徹底…
3Dモデリングとは?仕組みや作り方、ソフトの選び方までを徹底…
2026.02.06
3Dモデリングは、建築・製造・ゲーム・医療など、今やあらゆる分野で必要とされる“ものづくりの基盤技術”です。 し
-
 建築パースとは?制作方法や必要なスキルなどを解説!…
建築パースとは?制作方法や必要なスキルなどを解説!…
2026.01.19
建築パースは、建物の「完成後の姿」を立体的に伝えるための重要な表現手法です。 プレゼンや設計検討に欠かせない存在
-
 建設DXとは?課題を解決する建設DXのメリットや活用される技…
建設DXとは?課題を解決する建設DXのメリットや活用される技…
2025.12.23
人手不足の深刻化や長時間労働、低い生産性など、日本の建設業界は複数の構造的な課題を同時に抱えています。こうした状





<株式会社アルファコックス>
建築・土木・インテリア関連CG・
3Dモデルソフトウェアの販売・サポート