LiDARとは?種類仕組みから活用事例まで徹底解説!

LiDAR(ライダー)は、レーザーの光を当てて反射を調べることで、物の距離や形を正確に測る技術です。自動運転の車やロボットの「目」として注目されるほか、最近ではスマートフォンやタブレットにも搭載され、身近な場面でも使われるようになってきました。地図づくりや建設現場の測量など、さまざまな分野で活用が広がっている技術です。
本記事では、LiDARの基本的な仕組みや種類、活用事例に加え、普及を妨げる課題などをわかりやすく解説します。
LiDAR
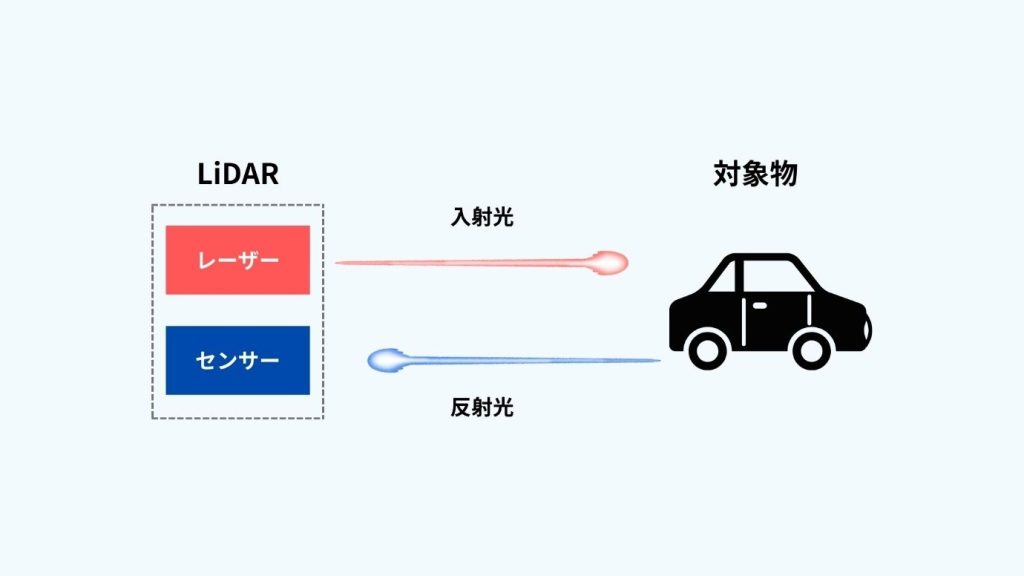
LiDAR (ライダー) は「Light_Detection_And_Ranging(光検出と測距)」の略称です。これは、ターゲット(対象物)にレーザー光を照射し、その散乱光(反射光)を測定することで、対象物までの距離やその性質を分析する技術です。
※LiDARは、「Laser_Imaging_Detection_And_Ranging」の略称とされる場合もあります。
▼イメージ図
ミリ波レーダーとの違い
LiDARはレーダーと原理的に似ていますが、電波を使うレーダーに対し、LiDARは光を利用する点が大きな違いです。
| 項目 | LiDAR | レーダー(Radar/ミリ波レーダー) |
|---|---|---|
| 原理 | レーザー光(紫外線・可視光線・近赤外線)を利用 | 電波(マイクロ波・ラジオ波・ミリ波)を利用 |
| 波長 | 非常に短い(約250nm〜10µm) | 長い(ミリ波など) |
| 光束密度 | 高密度でコヒーレンスが高い | 低い |
| 検出能力 | 高精度な3Dデータ、形状認識、小さな物体(エアロゾルなど)を検出可能 | 距離・速度測定に優れるが、形状把握や小物体検出は不得手 |
| 天候耐性 | 雨・霧・埃で精度が低下しやすい | 天候に強く、夜間でも安定動作 |
主な測距方式
LiDARの測距方式は、主に以下の3種類に分けられます。それぞれの方式は、測定したい距離、精度、環境、コストなどに応じて使い分けられます。
ToF(Time of Flight: 飛行時間方式)
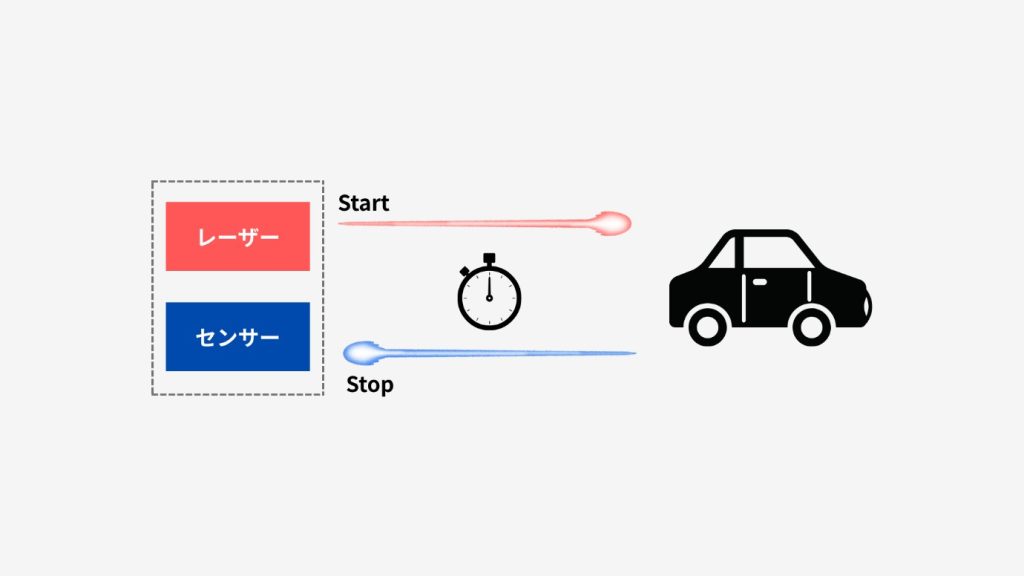
ToF方式は、レーザー光を対象物に照射し、反射して戻るまでの時間を測定して距離を算出する方式です。パルス波を用いるdToFと、連続波の位相差を利用するiToFがあります。
構造がシンプルで高速・長距離測定に対応し、低コスト化も進んでいますが、強い外光や他のLiDARとの干渉に弱い点が課題だといえるでしょう。
ToFは主に、自動運転車やロボット、スマートフォンの3Dスキャンやセンサー、駅のホームドアやゴルフ距離計など幅広く活用されています。
FMCW(周波数変調連続波方式)
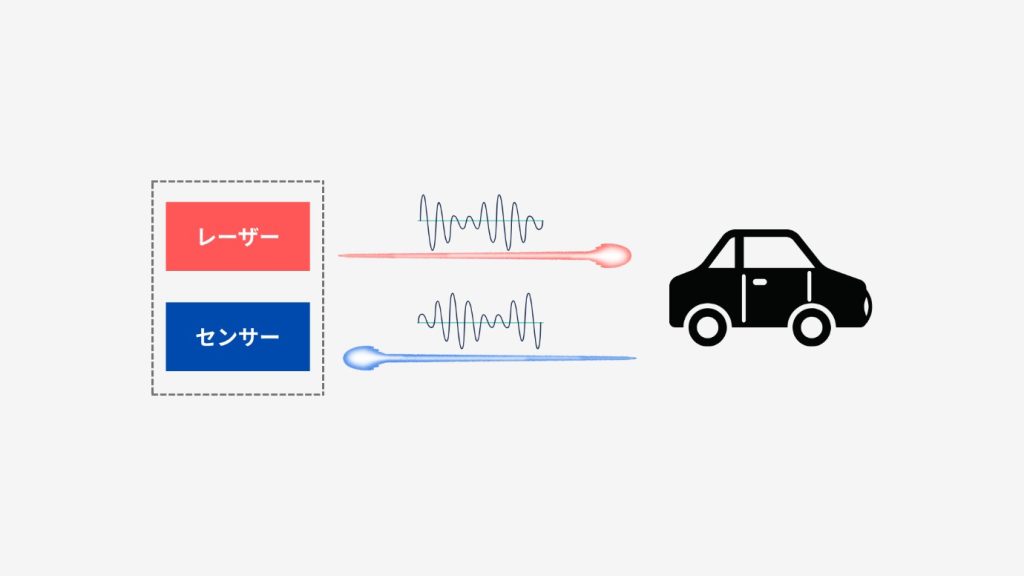
FMCW方式は、周波数を連続的に変化させたレーザー光を照射し、反射光との周波数差から距離と相対速度を同時に測定する方式です。
高精度で装置間干渉に強いというメリットがあり、自動運転や産業機器向けに注目されています。一方で信号処理が複雑で、ToF方式の約10倍とされる高コストが課題です。
三角測距方式

三角測距方式は、光源と対象物、受光素子の位置関係から相似三角形を利用して距離を算出する方式です。高精度な位置測定が可能で小型化しやすい一方、測定範囲が狭く長距離には不向きだといえます。
三角測距方式は、非接触距離センサーや自動車の障害物検知、産業用ロボットのビジョンシステムなどに活用されています。
測距範囲による分類
LiDAR(ライダー)システムは、測距範囲(次元)に応じて主に以下の3種類に分類されます。
1D LiDAR

1D LiDARは一点にレーザーを照射して距離を測定する方式で、低コストで狭い範囲を検知できるのが特徴です。距離計やスマートフォンの近接センサーに利用されるほか、2点間の距離から建物や樹木の高さを算出する用途にも活用されています。
2D LiDAR

2D LiDARはレーザーをライン状に走査して平面情報を取得する方式です。1回のスキャンで距離と角度を計測でき、270°〜360°と広い範囲をカバーできます。回転体を用いるタイプと、可動部を持たないソリッドステート式があり、主に障害物検出や形状識別に活用されています。
3D LiDAR
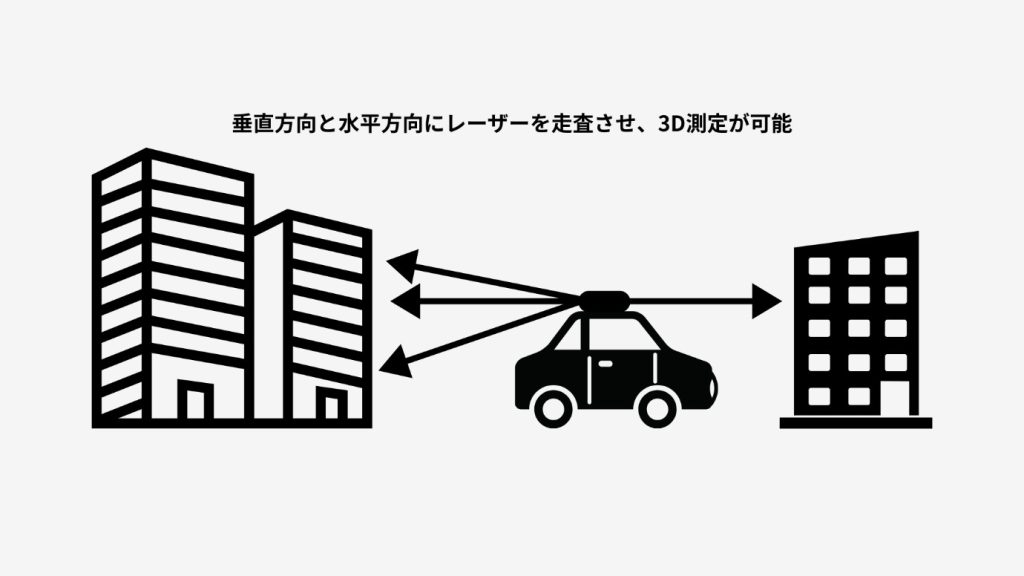
3D LiDARは垂直・水平方向にレーザーを走査して3次元データ(点群データ)を取得する方式です。2D LiDARに比べて1軸多い機構を持ち、より豊富な情報を収集できます。3D地図の作成やロボット・AGVの自律走行、障害物検知など、多くの情報を必要とする分野で活用されています。
点群データについては、こちらの記事をご覧ください。
LiDARの活用事例
LiDARは、自動運転からスマートフォン、測量まで幅広く活用されています。ここでは、活用事例を簡単に見ていきましょう。
モビリティ・交通分野

LiDARは自動運転車の「眼」として最も注目される技術です。車両や歩行者、障害物、建物の距離や形状を三次元で高精度に検知し、安全な自律走行を支えています。
自動運転システム
LiDARの活用が進んで分野の一つが、車両の自動運転システムです。例えば、ホンダ・レジェンド(世界初のレベル3)、トヨタ・ミライやレクサス・LSの「Advanced Drive」、BMW 7シリーズ、ボルボEX90、メルセデス・ベンツSクラス/EQSなど、多くの車種に搭載されています。
ロボットの自律移動
AGV(自動搬送車)や掃除ロボット、配膳ロボットなどの障害物検知や自律走行への活用が進んでいます。
産業用ロボット
物流倉庫のピッキングロボットで、商品の位置や形状を把握するために利用されています。
モバイル分野

近年、LiDARが最も身近になった分野がスマートフォンやタブレットです。例えば、AppleのiPhone 12 Pro以降のProシリーズやiPad Pro第2世代以降にはLiDARスキャナーが搭載され、以下のような機能に活用されています。
AR(拡張現実)
現実空間に仮想オブジェクトを自然に配置でき、身体や周囲との位置関係を正確に反映したリアルな表現が可能です。
3Dスキャン/計測
カメラを通して寸法を測定する「計測アプリ」や、3Dスキャン機能で利用されます。
カメラ機能の強化
夜間撮影でのオートフォーカス精度向上や、被写体と背景の距離を反映した自然なぼかしを実現しています。
また、建設分野でもiPhoneやiPadのLiDAR機能が活用され、国土交通省の要領に準拠した出来形管理に利用可能です。高価な機材を用意せずに3次元測量を行えるため、小規模現場での効率化やコスト削減にも貢献しています。
測量・マッピング・建設・土木分野

LiDARは航空測量や地形図作成など、高精度な3次元データ収集が必要な分野で古くから活用されてきました。
地形調査・地図作成
航空機にLiDARを搭載して広範囲の地形データを取得し、高解像度な地図作成などに活用されます。
建設・土木
施工前後の測量や出来形管理、橋梁・トンネルなどインフラの点検・維持管理に利用されます。
土砂の測量
新潟県中越地震後の芋川流域では、航空レーザー測量と地上測量により土砂移動を定量的に把握し、砂防計画の基礎データとして活用された事例もあります。
MMS(Mobile Mapping System)
LiDAR装置をはじめ、様々な計測機器を車両に搭載して、走行しながら周辺環境をマッピングします。
ドローン活用
軽量LiDARを搭載して飛行するため、山間部でも樹木の下の地表データを取得可能です。送電線や電柱などのインフラ点検や3Dマッピングにも活用できます。
3D測量については、こちらで詳細を解説していますのでご覧ください。
LiDAR普及に向けた主な課題
LiDARは様々なシーンで活用されていますが、普及を妨げるデメリットもあります。ここでは、LiDARの主な課題について見ていきましょう。
コストの課題
LiDARは高精度レーザーや高度なデータ処理を必要とするため高価で、低価格モデルは数万円からある一方、自動運転向けのハイエンドモデルは数百万円に達します。特にFMCW方式はToF方式の約10倍の製造コストがかかるという試算があるほどです。また、自動運転では複数台のLiDAR搭載が必要となり、車両価格を押し上げる要因となっています。
こうした高コストは量産化を妨げ、高級車以外への普及を難しくしており、「LiDAR外し」の動機や市場予測の下方修正にもつながっています。
悪天候による影響
LiDARはレーザー光を利用するため、雨・霧・雪・埃といった悪天候では光が散乱・吸収され、認識距離が大きく低下することが課題です。例えば自動運転に利用する際、車両や障害物の検知精度に影響し、安全性を損なう可能性があります。一方、ミリ波レーダーは電波を用いるため悪天候に強く、この点でLiDARより優位性を持っています。
光環境にも影響
LiDARは悪天候だけでなく、周囲の光環境にも影響されることが課題です。太陽光や強い照明下では外乱光によって精度が低下しやすく、特にToF方式では対向車のレーザー光に干渉される可能性があります。また、ToF方式はパルス光の識別が難しいため、LiDAR搭載車が増えると「自車のレーザー」と「他車のレーザー」を区別できず、誤認識を招く装置間干渉が懸念点の一つです。
測定距離の問題
自動運転、特に高速道路での運用には、LiDARの測定距離を大幅に延長する必要があります。現状のLiDARはコヒーレンス(可干渉距離)の制約により約50m程度が限界とされますが、安全な自動運転を実現するには、少なくとも300m程度まで測定可能距離を伸ばさなければなりません。
LiDARデータを効率的に活用する「Scan Essentials」
LiDARで取得した点群データは、そのままでは膨大で扱いにくいため、解析後の設計や検証に活かすには専用のツールが欠かせません。そこで役立つのが、SketchUpのプラグインである「Scan Essentials」です。
Scan Essentialsでは、E57・LAS・PLYなど多様な点群フォーマットをインポートでき、解析ソフトで処理済みのデータを直接SketchUp上に取り込み可能です。また、点群の移動・回転配置に加え、クリッピングボックスによる特定領域の抽出や、カラーモード切替による可視化も柔軟に行えます。
スナップツールや検証ツールを活用すれば、点群を基準に高精度なモデリングが可能です。例えば、LayOut(SketchUpの付属機能)との連携によって図面化もスムーズに進められます。
従来は煩雑だった点群の活用も設計プロセスへ自然に組み込めるため、モデリング工数の削減・精度向上・効率化を同時に実現できます。
Scan Essentialsの付属しているSketchUpはこちら
SketchUp Studio サブスクリプション Windows版 標準パック
SketchUp Pro Advanced Workflows サブスクリプション
SketchUp Pro Scan サブスクリプション
Scan Essentialsの機能については、以下の資料をダウンロードしてご覧ください。
まとめ
LiDARはレーザーを用いた高精度な距離・形状測定技術であり、自動運転や測量、スマートデバイスなど幅広い分野で実用化が進んでいます。レーダーに比べて精密な形状認識に優れる一方、悪天候に弱くコストが高いという課題は解決していかなくてはなりません。しかし、今後は小型化・低価格化・高性能化が進み、より多くの産業や生活の中に普及していくことが期待されます。
本記事で紹介した「Scan Essentials」について、動画でも詳しく解説していますでのご覧ください。

-
 3Dモデリングとは?仕組みや作り方、ソフトの選び方までを徹底…
3Dモデリングとは?仕組みや作り方、ソフトの選び方までを徹底…
2026.02.06
3Dモデリングは、建築・製造・ゲーム・医療など、今やあらゆる分野で必要とされる“ものづくりの基盤技術”です。 し
-
 建築パースとは?制作方法や必要なスキルなどを解説!…
建築パースとは?制作方法や必要なスキルなどを解説!…
2026.01.19
建築パースは、建物の「完成後の姿」を立体的に伝えるための重要な表現手法です。 プレゼンや設計検討に欠かせない存在
-
 建設DXとは?課題を解決する建設DXのメリットや活用される技…
建設DXとは?課題を解決する建設DXのメリットや活用される技…
2025.12.23
人手不足の深刻化や長時間労働、低い生産性など、日本の建設業界は複数の構造的な課題を同時に抱えています。こうした状





<株式会社アルファコックス>
建築・土木・インテリア関連CG・
3Dモデルソフトウェアの販売・サポート